Blog

Τα συστήματα υβριδικών κατεργασιών ανοίγουν το δρόμο για την επιτόπου επισκευή βιομηχανικών εξαρτημάτων υψηλής αξίας σε βιομηχανίες, όπως η αεροδιαστημική, το πετρέλαιο και το φυσικό αέριο κ.λπ. Ένα φορητό ρομποτικό κελί επισκευής επιτρέπει τη μετακίνηση της λύσης στο πρόβλημα, συντομεύοντας την αλυσίδα ανεφοδιασμού και αυξάνοντας δραματικά τη βιωσιμότητα των λειτουργιών επισκευής βιομηχανικών εξαρτημάτων μεγάλης κλίμακας, μειώνοντας σημαντικά τις απαιτούμενες μεταφορές. Για τον σκοπό αυτό, στα πλαίσια του HybridR αναπτύχθηκε ένα κελί με ιδιαίτερη έμφαση στην επισκευή εξαρτημάτων υψηλής αξίας εκτός από την εξαρχής κατασκευή τους.
Για τις περιπτώσεις σχεδιασμού φορητών κελιών για συστήματα υβριδικών κατεργασιών, ο σχεδιασμός της δομής του πλαισίου (load bearing structure) είναι ιδιαίτερα σημαντικός και περίπλοκος. Η κατασκευή αυτή θα πρέπει να παρέχει την απαιτούμενη δυσκαμψία για την υποστήριξη των φορτίων που αναπτύσσονται από τις κατεργασίες αφαίρεσης υλικού, ενώ παράλληλα να ελαχιστοποιεί το βάρος για την ενίσχυση του φορητού χαρακτήρα. Η τελική ακρίβεια του συστήματος επηρεάζεται από τη συμπεριφορά της δομής του πλαισίου, η οποία φορτίζεται από στατικά δυναμικά και θερμικά φορτία.
Για την υποστήριξη αυτής της προσπάθειας βελτιστοποίησης του σχεδιασμού στα πλαίσια του έργου HybridR, αξιοποιήθηκε το Ψηφιακό Δίδυμο (Digital Twin) της κατεργασίας ρομποτικού φρεζαρίσματος, λαμβάνοντας υπόψιν τόσο τη κατεργασία όσο και τον ρομποτικό βραχίονα για τον καθορισμό των οριακών συνθηκών για τον σχεδιασμό της φέρουσας δομής. Η αξιοποίηση Ψηφιακού Διδύμου για τον προσδιορισμό των οριακών συνθηκών κατά την προσομοίωση της συμπεριφοράς του ρομποτικού κελιού, μπορεί να οδηγήσει σε ένα ολοκληρωμένο εικονικό πρωτότυπο του συστήματος και να μειώσει τις ανάγκες δημιουργίας πρωτοτύπων.
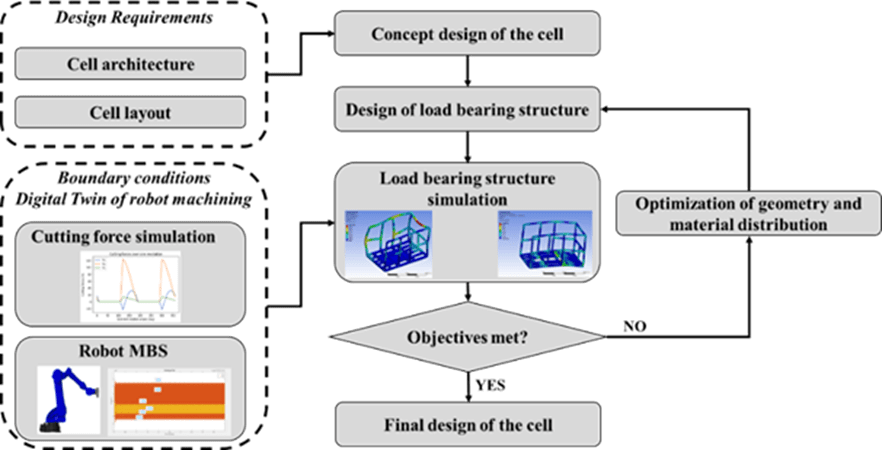
Εικόνα 1: Σύνοψη της σχεδιαστικής προσέγγισης
Τρείς διαφορετικές προσομοιώσεις πραγματοποιήθηκαν κατά το στάδιο του σχεδιασμού του πλαισίου του κελιού, ώστε να διασφαλιστεί η ασφαλής και αξιόπιστη λειτουργία και μεταφορά του:
- Προσομοίωση της κατεργασίας αφαίρεσης υλικού με χρήση του μοντέλου Multi-Body του ρομποτικού βραχίονα, το οποίο λαμβάνει υπόψιν την ελαστικότητα τόσο των μελών όσο και των αρθρώσεων.
- Στατική ανάλυση για τον υπολογισμό των τάσεων και των παραμορφώσεων που αναπτύσσονται κατά τη διάρκεια περιπτώσεων μεταφοράς.
- Δυναμική ανάλυση απόκρισης χρησιμοποιώντας ως είσοδο τις δυνάμεις που υπολογίστηκαν από την προσομοίωση της κατεργασίας.
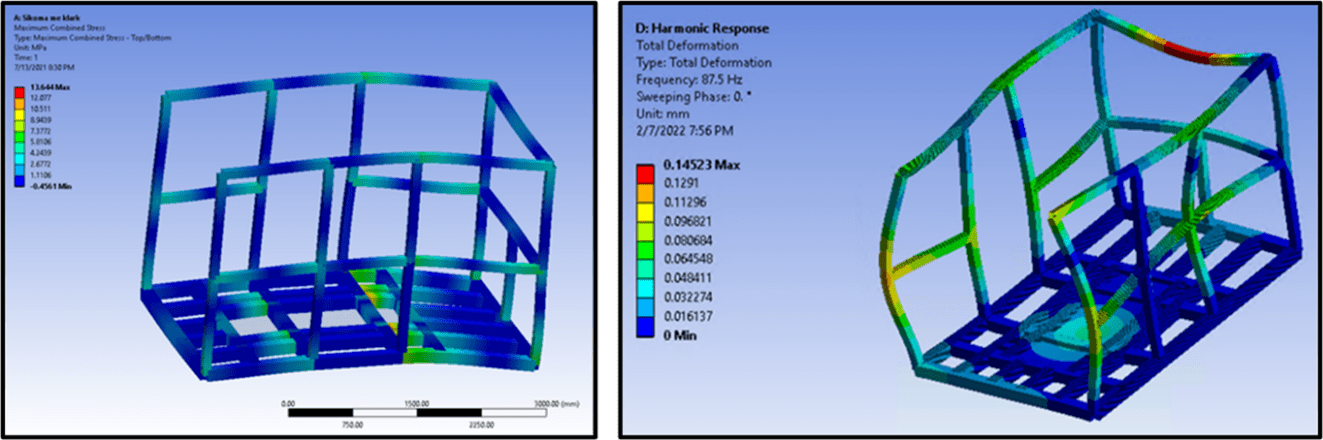
Εικόνα 2: Αποτελέσματα της στατικής και δυναμικής ανάλυσης (ANSYS)
Μέσω της γνώσης σχετικά με τη δυναμικής συμπεριφοράς του φορητού κελιού ρομποτικών υβριδικών κατεργασιών που προέκυψε από τις παραπάνω προσομοιώσεις, κατέστη δυνατός ο σχεδιασμός ενός πλαισίου με χαμηλό βάρος και υψηλή δυσκαμψία, ικανό να υποστηρίξει τα φορτία που αναπτύσσονται κατά τη διάρκεια κατεργασιών αφαίρεσης υλικού.
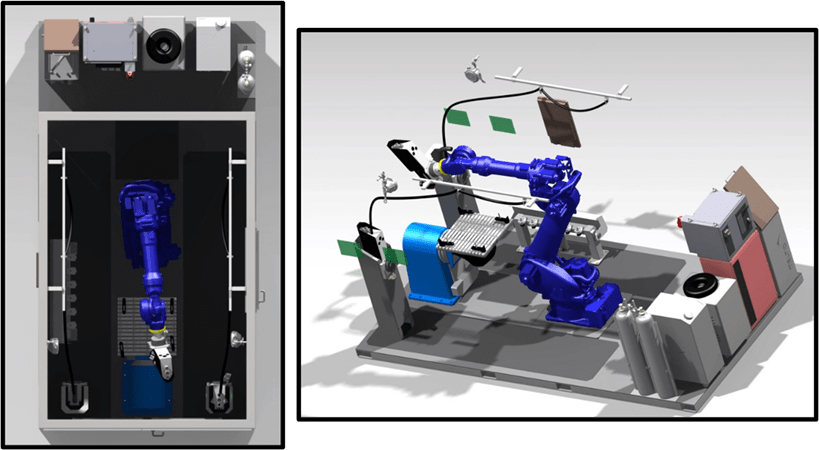
Εικόνα 3: Απεικόνιση της δομή του συνολικού κελιού