Blog

Η χρήση ρομπότ για κατεργασίες φρεζαρίσματος είναι μία καινοτόμα λύηση, δεδομένου ότι προσφέρουν μεγάλη ευελιξία σε ένα σύστημα παραγωγής και παρουσιάζουν πολλά σημαντικά πλεονεκτήματα σε σχέση με τις συμβατικές μηχανές CNC. Συγκεκριμένα, το φρεζάρισμα με ρομπότ προσφέρει μεγαλύτερους φακέλους εργασίας χωρίς αύξηση του κόστους, ενώ λόγω των ευέλικτων κινηματικών τους τους μπορούν να προσεγγίσουν και να κινηθούν σε στενές περιοχές, για την παραγωγή εξαρτημάτων με πολύπλοκο σχήμα. Ωστόσο, τα ρομπότ έχουν ένα εγγενές πρόβλημα με τη δομική ακαμψία, καθώς τα περισσότερα από αυτά έχουν σχεδιαστεί ως ανοικτές κινηματικές αλυσίδες που υποστηρίζονται από περιστροφικές αρθρώσεις. Κατά συνέπεια, οι δυνάμεις κοπής που ασκούνται στην άκρη του εργαλείου κατά το φρεζάρισμα μπορούν να οδηγήσουν σε σοβαρές αποκλίσεις της τροχιάς, όταν εφαρμόζονται μεγάλες δυνάμεις κοπής, με αποτέλεσμα η ακρίβεια να μην μπορεί να ανταποκριθεί στις απαιτήσεις αρκετών βιομηχανικών τομέων.

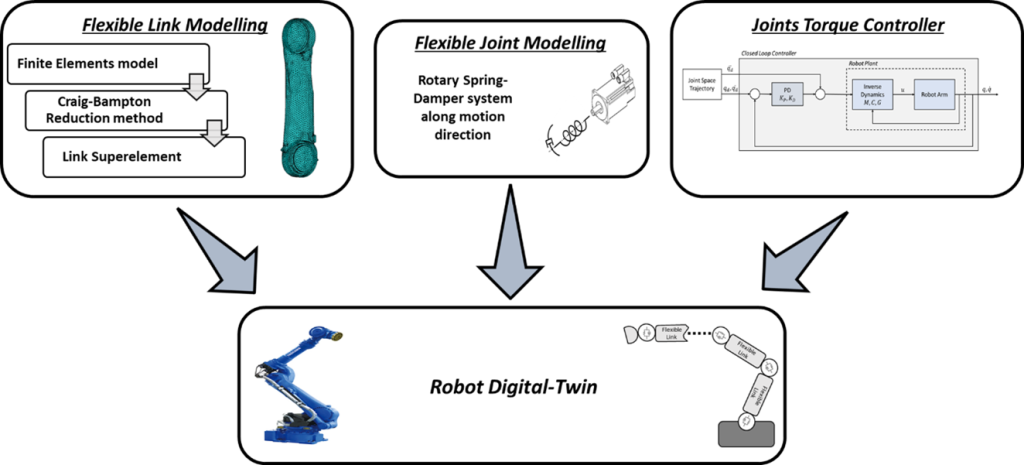
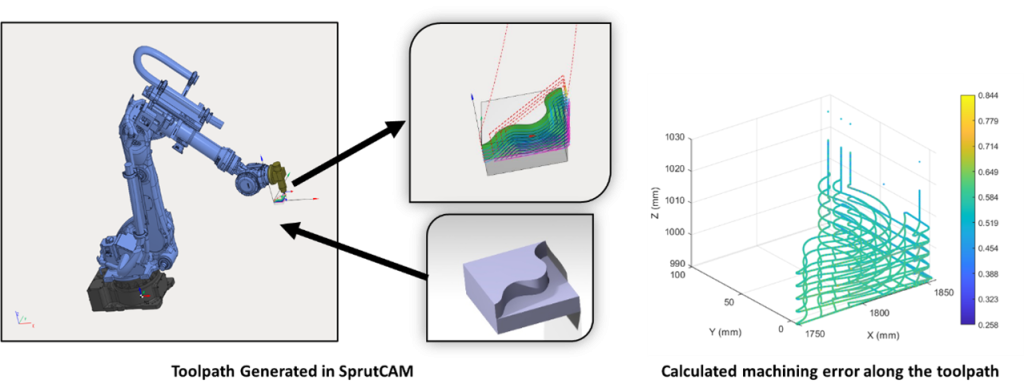
Το HybridR παρέχει μια λύση για την αντιμετώπιση αυτού του προβλήματος μέσω προηγμένης προσομοίωσης και των Ψηφιακών Διδύμων της κατεργασίας φρεζαρίσματος με ρομποτ. Έχει αναπτυχθεί ένα δυναμικό μοντέλο του ρομπότ κατεργασίας του HybridR, χρησιμοποιώντας τις μεθόδους Multi-Body Simulation (MBS) και Component Mode Synthesis (CMS), το οποίο είναι σε θέση να υπολογίζει τις παραμορφώσεις του ρομπότ καθ’ όλη τη διάρκεια της τροχιάς του εργαλείου. Η προσομοίωση συνδέεται με το SprutCAM (το CAM s/w που χρησιμοποιείται για τον προγραμματισμό του κελιού του HybridR), προκειμένου να προσαρμόζεται αυτόματα το πρόγραμμα του ρομπότ, με βάση τις απαιτήσεις του χρήστη όσον αφορά τις ανοχές της κατεργασίας και τα αποτελέσματα της προσομοίωσης.
Μέσω των αποτελεσμάτων της προσομοίωσης, το σφάλμα μορφής της κατεργασίας μπορεί να υπολογιστεί σε όλο το μήκος της τροχιάς του εργαλείου. Επιπλέον, ο ρυθμός πρόωσης του ρομπότ μπορεί να ρυθμιστεί αυτόματα τοπικά, ώστε να βελτιστοποιηθεί η διαδικασία και να διασφαλιστεί ότι οι ανοχές τηρούνται σε ολόκληρο το εργοτεμάχιο.
Περισσότερες πληροφορίες μπορείτε να βρείτε στο αντίστοιχο επιστημονικό άρθρο που προέκυψε από αυτή την εργασία.
Stavropoulos, C. Gerontas, H. Bikas, T. Souflas, “Multi-Body dynamic simulation of a machining robot driven by CAM”, 55th CIRP Conference on Manufacturing Systems, Volume 107, pg. 764-769 , 29 June – 1 July, Lugano, Switzerland (2022)